I used the mechanical gyroscope as the virtual horizon, towards which the electronics, controlling the video-camera, will be oriented. The mass of the flywheel of such gyroscope is significantly less than the mass of the mechanical gyroscope, assigned for the direct stabilization of the platform with the video-camera.
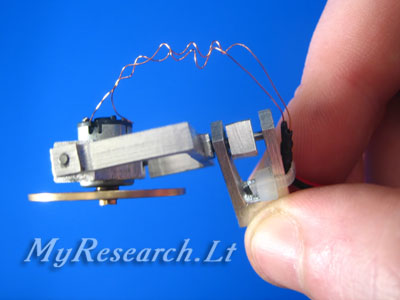
The magnetic sensor detects the position of the gyroscope in its gimbal. The analogous signal of the sensor is transmitted to the executive mechanism instead of the signal, coming from the internal potentiometer. In this case the analogous signal secures more accurate preciseness as it serves as the direct reference for the servo. Besides, the digital servo-mechanisms control their position several times more often than the period of incoming of the outside control signal. After alteration, the servo-mechanism, submits itself to control as usual, however, it detects the position not regarding the model, but regarding the independent inert system. The mechanical gyroscope does not need tuning, if compared with the electronic gyroscope. Many gimbals, assigned for the heavy cameras, rotate slowly, for example, for 60 degrees within 1-5 seconds. In case of the mechanical gyroscope, the delay of the servo does not cause distortion of the virtual horizon, i.e. lag is possible, but displacement of the fixed position will not occur. Thus, the virtual horizon of the mechanical gyroscope is more efficient than the electronic gyroscopes with piezo-sensors. One mechanical gyroscope secures stabilization along two axles. Accurate precision is necessary while producing the mechanical gyroscope and it is its drawback. Presence of the precise mechanics and of the vacuum body will affect the price of the device. The gyroscope, which had been used in the course of the experiments, was insufficiently precise; the axle of its rotation used to deviate gradually. Deviation used to make up to two degrees per minute. Convergence of the axle of the main rotor of the helicopter and of the axle of the gyroscope at the moment of turn of the model serves as one more reason of possible deviations, i.e. it is necessary to turn the model in its horizontal position, if the double-axle gimbal of the gyroscope turns together with the model.
Primarily, the analogous Hall’s bipolar sensors used to be installed on the gyroscope; determination of the angle of deviation was limited to 40 degrees. Thus, the gyroscope itself had to be deviated with the help of the micro servo, seeking for larger deviation of the camera.
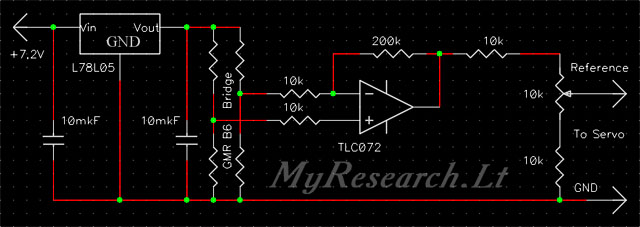
Later on, the magneto-resistant bridge sensors started to be used; the measurement limits increased up to 180 degrees.
The scheme of connection of the sensors: