Часто у фотографов и видео операторов возникает желание установить на модель тяжелую камеру, весом порядка трех килограмм. Людям, предъявляющим столь серьезные требования к изображению я рекомендую использовать полноразмерный самолет с живым оператором на борту. Для съемок с РУ модели вполне подойдет ручная видеокамера массой до 1 кг. Если вы, например, возмете телескоп, снимите со штатива и повесите на веревочке, то луну разглядеть не получится, независимо от того, был ли это дорогой или дешевый телескоп (в качестве объяснения, почему дорогая камера не обязательна).
Другое распространенное стремление – использовать сложные системы стабилизации с надеждой, что все это будет безупречно работать сразу после установки. Более правильное стремление – максимальная простота конструкции в сочетании с надежностью. Для фотокамеры активная стабилизация не нужна, достаточно сделать серию из десятков кадров и выбрать лучший. Для вертолета необходима тщательная настройка модели, устранение вибраций в механизмах, балансировка вращающихся узлов. Для модели самолета важна хорошая аэродинамика, хорошая погода, правильный выбор скорости полета. А самое главное – умение плавно управлять моделью.
Рекомендации по выбору видеокамеры для радиоуправляемой модели:
1. Записывать видеосигнал надо на борту, так как даже с лучшими образцами радиопередатчиков все равно бывают помехи.
2. Видеосигнал должен записываться не механическим способом, т.е. на карточку Flash памяти.
3. Для того, что бы лучше ориентироваться на местности по передаваемому изображению, нужен широкоугольный объектив.
4. При использовании широкоугольного объектива или объектива «рыбий глаз» вибрация камеры менее заметна.
5. Камера должна иметь цифровой, а не оптический стабилизатор изображения. У меня был опыт, когда линза оптического стабилизатора вибрировала больше, чем сама модель (video: http://www.vimeo.com/2804044).
6. Желательно установить ручную фокусировку и короткую выдержку.
Выбор и модификация вертолета для видеосъемки
Чем крупнее модель вертолета, тем стабильнее ее полет. Пилотажные модели вертолетов способны поднять в воздух столько же, сколько весят сами, но не следует увеличивать вес модели более, чем в полтора раза. Если вес модели увеличился в полтора раза, то длину лопастей желательно увеличить на 15%. Ротор с четырьмя лопастями предпочтительнее двухлопастного. Лопасти должны быть не симметричного профиля. Симметричные лопасти нужны только для пилотажных полетов, их КПД ниже, чем у обычного профиля. Скорость вращения ротора должна быть ниже, чем у пилотажной модели. Для снижения оборотов ротора на двигатель устанавливается шестерня с меньшим на 15-20% числом зубьев, относительно пилотажного варианта. Для снижения вибрации, шума и грязи желательно выбирать электрический вертолет. Вертолет с увеличенной нагрузкой, но не выполняющий резких маневров, может и должен потреблять меньше энергии, нежели пилотажный вариант. При выборе мотора и батарей важнее экономичность, емкость и вес, а не максимальная мощность, выдаваемая за короткий момент.
Отдельное внимание стоит уделить вертолетам с несколькими винтами (мультикоптеры). Такие летательные аппараты как правило проигрывают обычному вертолету по таким параметрам, как грузоподъемность, маневренность, продолжительность полета. Перечисленные недостатки во многом связаны с использованием несущих винтов с фиксированным шагом, возможно, что скоро это измениться. Достоинства таких летательных аппаратов: наличие хороших систем электронной стабилизации и автопилота при невысокой стоимости, аппаратом легче управлять не опытному пилоту, простота эксплуатации и ремонта, более высокая безопасность в случае аварии, возможность разместить камеру в центре рамы.
Очень часто встречаются люди осуществляющие погоню за своей жадностью в технических характеристиках: что бы модель могла летать как можно дальше, как можно дольше, поднимать большой вес, красивый корпус, автопилот на все случаи и так далее. Обычно список таких требования находится в обратной пропорции к понятию «надежность», получается модель с плохой управляемостью и плохой стабильностью
Устранение вибрации и раскачивания
На радиоуправляемой модели можно выделить три вида нежелательных колебаний: а) вибрация, связанная с работой двигателя и механических систем; б) тряска, связанная с воздушными потоками; в) раскачивание модели при маневрировании.
На модели вертолета вибрации наиболее сильны. Для снижения вибрации можно применять амортизаторы, используемые в промышленности. Обратите внимание на оптимальную нагрузку, которая обычно указана на таком амортизаторе.
Для установки небольшого фотоаппарата можно использовать амортизаторы, взятые из автомобильного проигрывателя CD-DVD дисков. Обычно в проигрывателях установлены небольшие резиновые амортизаторы с гелем внутри.
Можно изготовить достаточно легкий амортизатор из двух пластин, между которыми зажата мягкая резина (мягкие уплотнители), а снаружи пластины сжимаются резиновыми кольцами. Если вы боитесь, что резина порвется, то установите дополнительно свободно висящие страховочные ремешки.
Для смягчения тряски используются амортизаторы, предназначенные для шасси радиоуправляемых автомобилей. Эти амортизаторы состоят из пружины и пневматического или масляного поршня. Свободно качающаяся платформа камеры с противоположных сторон поджимается такими амортизаторами.
Для компенсации раскачивания применяется механический гироскоп. Механический гироскоп – это идеальное решение для стабилизации камеры, если во время съемки не требуется выполнять маневры. Камера устанавливается на свободно качающейся платформе. На платформе вместе с камерой устанавливается тяжелый механический гироскоп. Камера должна быть сбалансирована таким образом, что бы ось выключенного гироскопа была в строго вертикальном положении. Если положение платформы выравнивается амортизаторами, то гироскоп делает раскачивания более плавными. Если камера устанавливается на малоподвижном объекте, например - на дирижабле, то центр массы платформы с гироскопом и камерой может быть опущен на несколько сантиметров вниз относительно осей подвески. На подвижном объекте, например вертолете, центр массы должен быть приближен к осям подвески, иначе камера будет раскачиваться во время маневров как большой и тяжелый маятник (плавно, но долго). Недостаток механического гироскопа – эффект прецессии. Пример эффекта прецессии, это когда инерция тянет камеру влево, а отклоняется камера вверх. Разворачивать гироскоп необходимо в горизонтальном положении. Если во время разворота гироскоп будет наклонен, то из-за эффекта прецессии наклониться и камера. Гироскоп эффективно стабилизирует камеру, но при недостаточной точности изготовления сам создает сильные высокочастотные вибрации. Если нет возможности изготовить точно сбалансированный диск гироскопа, то необходимо увеличивать его массу и снижать обороты вращения.
Радиоуправляемый вертолет является слишком легким аппаратом и не может обеспечить идеальную стабильность камеры. По этому, прежде чем продемонстрировать отснятые видеокадры оставшиеся вибрации устраняют компьютерным фильтром. Фотокадры с длинной выдержкой удаются редко.
Активная подвеска видеокамеры.
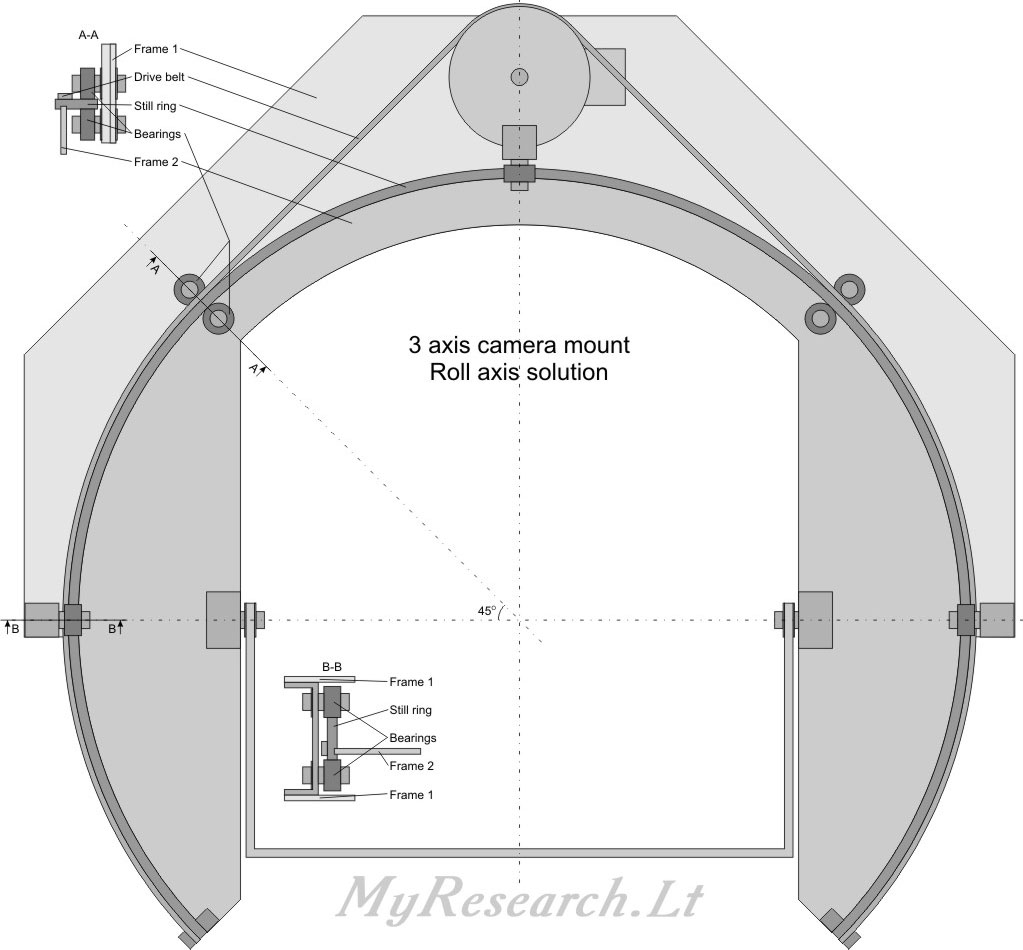
Активная подвеска видеокамеры позволяет направлять камеру в требуемом направлении, независимо от положения модели. В большинстве случаев такая подвеска имеет две оси – панорама и наклон. Для легких камер используется прямой привод от стандартных сервомеханизмов. Часто используются сервомеханизмы с увеличенным углом отклонения. Также активная подвеска может использоваться для стабилизации камеры. Для стабилизации используются подвески с тремя осями: панорама (Z), боковой крен (Y), наклон (X). Обратите внимание, что некоторые активные подвески с тремя осями вращения в некоторых положениях обеспечивают возможность стабилизации только по двум осям. Такое случается если оси подвески могут совмещаться. Например, обратите внимание на подвески, где камера установлена внутри вращающегося поперечного диска. Если камера обращена вниз, то оси панорамы (Z) и крена (Y) совпадут, а все боковые раскачивания модели передадутся камере. Наличие вращающегося диска вокруг камеры это наиболее сложное и ненадежное место таких конструкций. Смысл этого диска в том, что бы при вращении по всем осям центр массы подвески оставался на одном месте. Диск вращается по принципу большого подшипника, но изготовлен из легкого метала. Деформация такой конструкции приводит к люфтам и заклиниваниям. Называть производителей описываемых подвесок я не буду, отмечу только, что речь идет о «профессиональных» подвесках, производимых в 2009 году. На схеме ниже я привожу пример альтернативного решения. Радиальная фиксация осуществлена только в двух точках. По этому гибкая деформация стального обода не приводит к заклиниванию или люфтам. Ось наклона (Х) остается третьей по счету, это значит, что трехмерная стабилизация камеры возможна всегда.
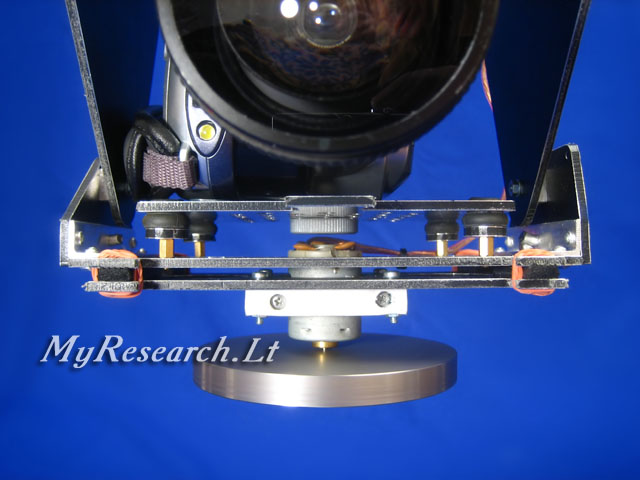
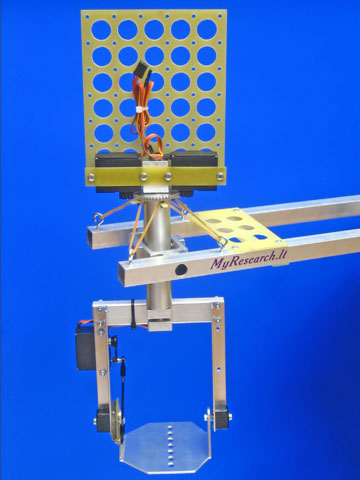
Трехосная подвеска может обеспечить неподвижность камеры на неустойчивой модели, но при умышленном повороте камеры горизонт может наклоняться. Если, например, нос модели поднят, то вертикальная ось подвески имеет наклон; если камера была повернута вбок и горизонт был ровным, то стоит повернуть камеру вперед, как горизонт окажется наклоненным. Что бы такой эффект не возникал необходима четырехосная подвеска. В четырехосной подвеске две оси обеспечивают вертикальное положение третьей оси панорамного вращения, а четвертая ось обеспечивает наклон камеры. Как и в описанном выше варианте, центры масс всех подвижных узлов должны точно совпадать с осями вращения. Ниже представлен пример четырехосной подвески.
Оси горизонтальной стабилизации не управляемые. Ось поворота по панораме управляемая и стабилизируется электронным гироскопом. Ось наклона камеры управляемая, но не стабилизируемая. Для предотвращения колебаний камеры на управляемой оси наклона установлен демпфер, тормозящий вращение.
Управляемый наклон камеры вызывает отклонение вертикальной оси, по этому управление должно быть плавным. Чтобы во время горизонтального движения камера не отклонялась необходимо, что бы центр воздушного давления совпадал с центром массы вращающегося узла и с осью вращения. Благодаря подвижным фиксаторам рама подвески может быть зафиксирована на раме радиоуправляемого вертолета любого производителя.
Подвеску такого типа так же удобно размещать в центральной части мультикоптера. Вертикальное положение подвеса обеспечивается резиновыми растяжками, натяжение которых должно быть очень слабым, что бы не вызывать раскачивания. Такая подвеска камеры идеально сохраняет свое положение при ускорении модели в любом направлении. При раскачивании модели раскачивание частично передается камере. Если убрать резиновые растяжки, то раскачивание на камеру не передается, но камера постепенно наклоняется.
Если ось вращения не совпадает с центром массы вращаемого объекта, то работа серво приводит к раскачиванию конструкции. Ниже приведен пример подвески, где ось наклона находится выше камеры. Серво привода такой оси должен быть отключен от потенциометра (модификация на 360 градусов). Такая подвеска может использоваться для управления камерой, но серво не может эффективно использоваться для стабилизации. Для стабилизации может быть применен механический гироскоп. Механический гироскоп более эффективен по сравнению с электронным, так как электроника не стабилизирует сама по себе, а действует через серво. Недостатками серво привода являются задержка реакции и люфты. Из-за небольших дерганий камеры изображение становится не четким.
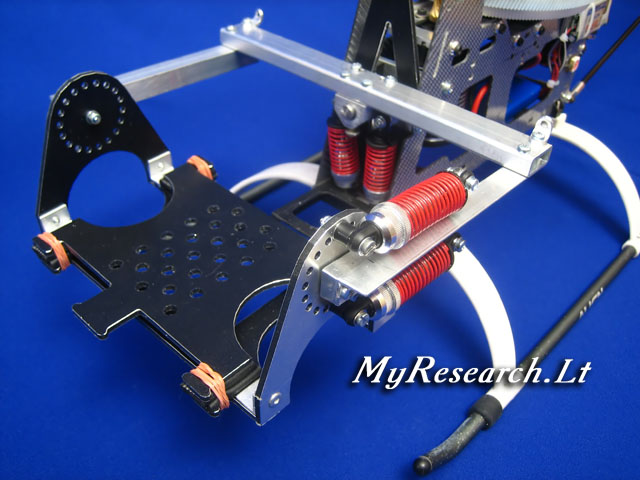
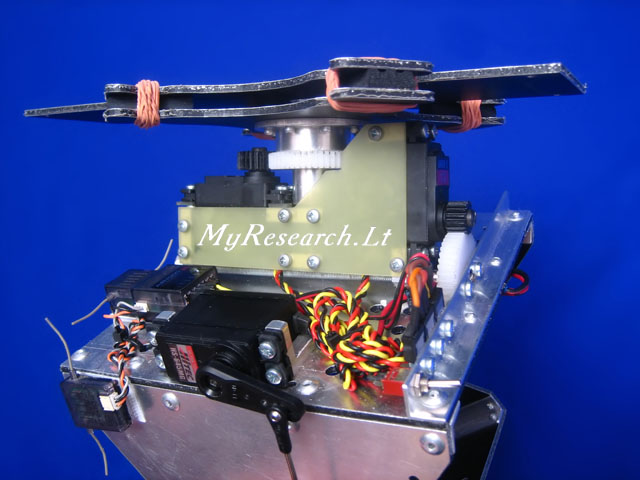
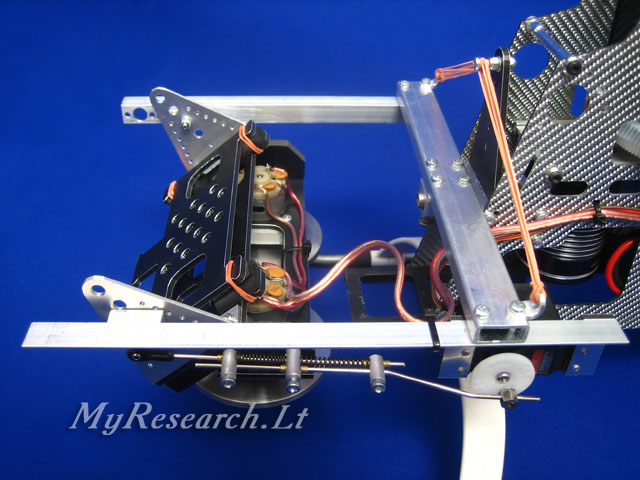
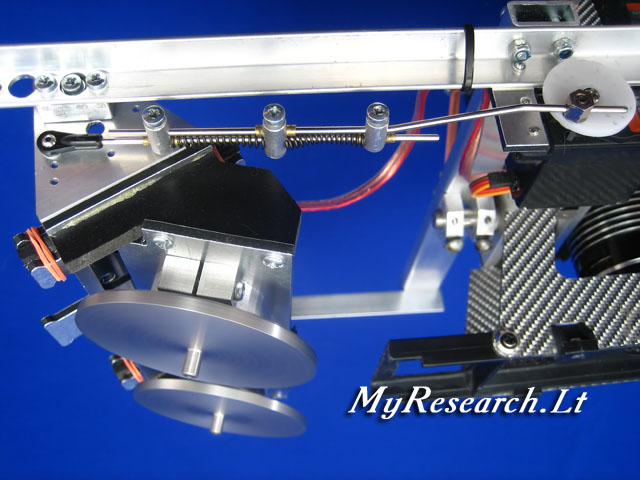
Важным моментом является жесткость конструкции подвески камеры. Встречается много портящих крбон роизводителей, заявляющих о "профессиональной технике" только из-за использования дорогих материалов. Жесткость конструкции напрямую связана с размерами и весом. Большие размеры рамы - это большой вес и низкая жесткость. Возможные дергания камеры определяются жесткостью рамы, суммой люфтов в соединениях и мертвой зоной сервомеханизма. Люфты в трансмиссии сказываются в меньшей степени, если обратная связь осуществляется относительно положения последнего элемента в конструкции. То есть, желательно, чтобы вместо внутреннего потенциометра сервомеханизма использовался потенциометр установленный непосредственно на подвеске камеры. Дергания камеры могут быть меньше, если потенциометр серво вовсе не связан с механизмом. Если потенциометр отключен, то камера не будет сама возвращаться в нейтральное положение, но электронный гироскоп будет действовать. Установка тяжелого механического гироскопа в значительной степени устраняет дерганья камеры и делает ее движения более плавными. Но установка механического гироскопа с тяжелым маховиком на большинство активных подвесок будет не корректным решением. Механический гироскоп должен устанавливаться на платформе, у которой есть возможность свободного движения в пределах возможных колебаний. Если платформа с гироскопом упирается в редуктор сервопривода, то это само по себе будет создавать нежелательные толчки. Если сервомеханизм переделан для режима работы «360 градусов», то его сопротивление гироскопу будет пассивным, но и это не желательно. По этому можно пойти иным путем – исключить жесткие связи между подвеской камеры и моделью и установить тяжелый механический гироскоп. Пример такого решения представлен на фотографии:
В данном примере наличие пружины между серво и камерой позволяет использовать стандартное серво без редуктора. Мощности стандартного серво вполне хватает, если центр массы камеры установлен правильно. Дополнительный редуктор, который увеличивает силу крутящего момента, снижает скорость вращения подвески. Часто устанавливают серво с черезмерной мощностью и дополнительным редуктором для предотвращения раскачивания, которое может усиливаться исполнительным механизмом. Так как механизм с видеокамерой обладает инерцией, то при быстром вращении он не останавливается в той точке, где остановился бы серво без нагрузки. После того, как механизм проскочил нейтральную позицию, серво начинает возвращать его назад. В результате возникает раскачивание. Механизм со значительным редуктором не способен быстро вращать камеру и сам является хорошим тормозом. Опытные моделисты знают, что если установить на хвостовую балку вертолета медленный сервомеханизм, то электронный гироскоп не сможет удерживать вертолет ровно. Т.е. медленный серво привод не эффективен для стабилизации при резких движениях.
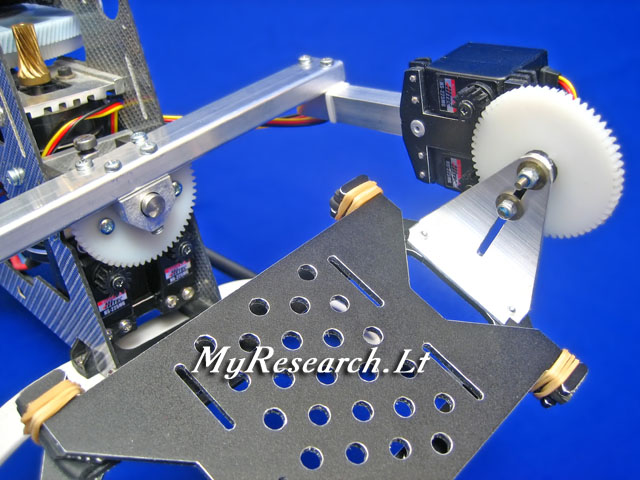
В следующей подвеске осуществлено иное решение: использованы два сервомеханизма на каждую ось вращения. Система с двойным сервоприводомдостаточно проста. Возможно, вы видели, как у моделей класса F3P до взлета дрожат элероны. Во время полета дрожания нет благодаря нагрузке, создаваемой воздушным потоком. Устанавливаемые два сервомеханизма действуют синхронно, но в нейтральном положении создают небольшую и регулируемую нагрузку в противоположных направлениях. В результате устраняются люфты в трансмиссии, компенсируются мертвые зоны исполнительных механизмов, предотвращается раскачивание. За счет мягкой работы двойного сервопривода повышается четкость видеоизображения. По аналогии, положение конечностей у животных фиксируется парой противоположных мышц. Эта информация может быть полезной при изготовлении двойного сервопривода.
Некоторые производители утверждают, что люфт устраняется при замене шестерен на ремень. Хорошо прижатые шестерни не имеют люфта и в отличие от ремня обеспечивают более жесткую трансмиссию. Ремень удобен если расстояние между ведущей и ведомой шестерней велико. Возьмите лучшие образцы серво и внутри найдете пять пар обычных шестерен, а не ремни. Ремень при работе шумит меньше, чем шестерня, но на радиоуправляемом вертолете уровень звукового шума от серво не имеет значения.
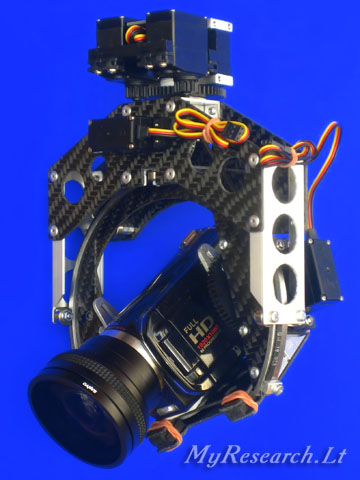
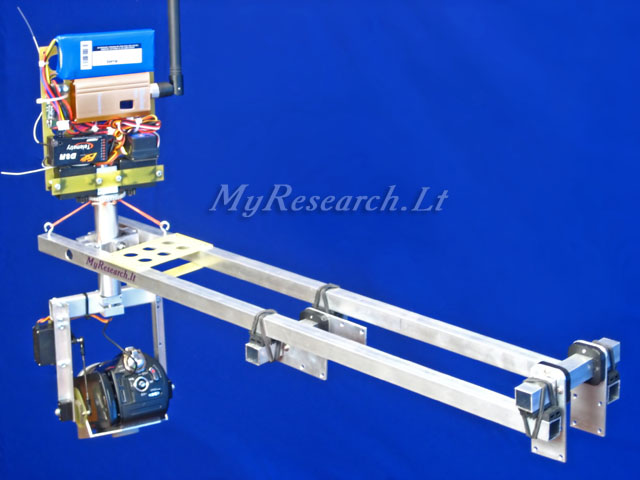
Выше была представлена подвеска для вертолета, у которой отсутствует ось панорамы. Ось панорамы не устанавливалась чтобы обеспечить приемлимое качество съемки, при небольшом весе конструкции. О взаимосвязи между размерами конструкции, ее жесткостью и весом говорилось выше. При таком варианте крепления подвеска позволяет осуществлять активную стабилизацию положения камеры в горизонтальной плоскости по осям продольного наклона и бокового крена. Для контроля этих отклонений применяются два электронных гироскопа. Стабилизация по оси вертикального вращения осуществляется бортовым гироскопом вертолета.
Управление моделью и камерой может осуществлять один человек. Для этого желательно наличие дополнительных систем стабилизации модели по оптическому горизонту, высоте и координатам. Схема подключения инфракрасного датчика горизонта к обычному сервомеханизму описана в статье «Модификация сервомеханизмов». Если необходимо осуществлять съемку не с фиксированной позиции, а в движении, то для управления камерой и моделью используются два пульта. Управление поворотом вертолета может осуществляться с обоих пультов. Для этого сигналы с двух приемников смешиваются при помощи V-Tail микшера. Во время съемки оператор ориентирует модель на снимаемый объект, а пилот контролирует модель, сохраняя заданный курс. Возможно также распределение сигналов управления между двумя пультами на земле. Подробнее о способах микширования читайте в статье «микширование сигналов управления с разных пультов». Недостатком такого способа управления является часто возникающая необходимость для пилота вести вертолет боком. Преимуществом такого способа является возможность более точно следовать за движущимся объектом. Контролировать положение модели удобно при взгляде со стороны, а следовать заданному маршруту – по изображению бортовой камеры.
Сегодня большинство производителей активных подвесок стремится удовлетворить наиболее часто встречающуюся глупую просьбу клиента: сделать легкую подвеску для крупной камеры с тремя осями управления и активной стабилизации. Если вы относитесь к числу тех, кто уже приобрел такой продукт, то можете провести эксперимент: возьмите широкоугольную камеру высокого разрешения, но без оптического стабилизатора (не с выключенным, а с отсутствующим стабилизатором); жестко закрепите эту камеру в центральной части корпуса модели; попробуйте снять видео. Если ваша модель хорошо настроена и не имеет слишком больших вибраций, то во многих случаях получается более четкое изображение, нежели с использованием специальной подвески. Активная подвеска может обеспечить неподвижность линии горизонта, но из-за слабой конструкции может усиливать вибрации и давать заметные подергивания, что скажется на четкости изображения. Применение амортизаторов так же может вызывать резонансные колебания конструкции. Иными словами, если у вас мало опыта в конструировании и настройке механических устройств, то более разумно будет стремиться к максимальному упрощению конструкции.
Настройка электронного гироскопа в активной подвеске.
В идеальном варианте гироскоп должен устанавливаться на узле, который вращается сервоприводом, соединенным с этим гироскопом. При этом используется режим удержания (heading hold или AVCS), но если конструкция подвески не достаточно жесткая и имеются люфты, то в таком режиме камера будет вибрировать. В ином варианте, гироскоп устанавливается на раме, относительно которой сервомеханизм вращает конструкцию. При этом используется режим обычной компенсации, но в таком режиме позиция камеры может постепенно смещаться. Во втором случае требуется более точная настройка гироскопа. Камера должна быть установлена таким образом, что бы центр массы вращающейся платформы совпадал с осями вращения. Для этого необходимо снять шестерни с серво и добиться равновесия платформы. Равновесие проверяется при горизонтальном и при вертикальном положении камеры. Функция сервомеханизмов заключается в сохранении горизонтального положения. Чем лучше сбалансирована подвеска, тем меньше нагрузка на сервомеханизмы и применение мощных сервомеханизмов для активной стабилизации не требуется.
Эта статья написана до того, как была разработана более совершенная инерционная система стабилизации. Принцип действия этой системы продемонстрирован на видео:
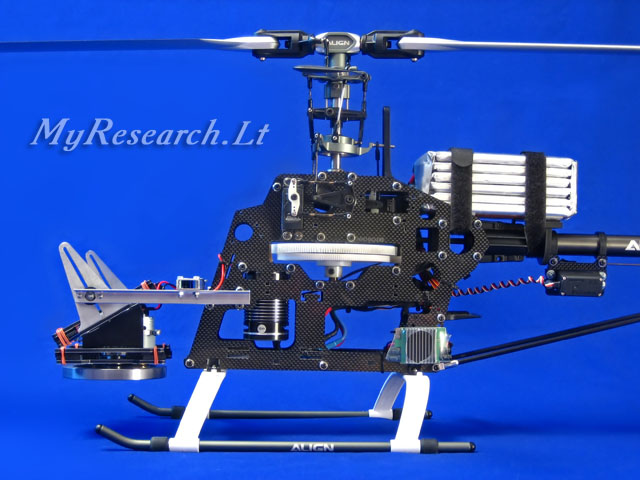
Размещение камеры под днищем вертолета
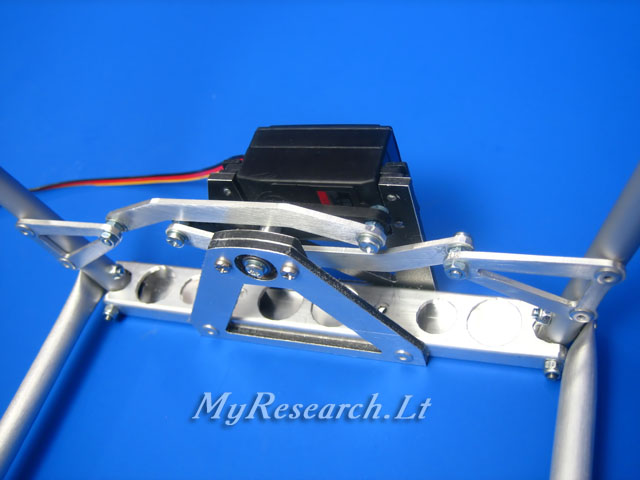
Размещение камеры под днищем вертолета позволяет получить широкий обзор и не вызывает смещения центра тяжести модели в сторону. Но происходит смещение центра тяжести вниз, а это негативно сказывается на управляемости модели. Если под днищем вертолета установлена камера на управляемой подвеске, то шасси должны быть не только увеличены, но и быть убираемыми, что бы не мешать камере. Шасси "открытое дно" изготовлены из алюминиевого профиля и устанавливаются вместо обычных шасси. Масса обычных шасси вертолета 50-90 класса 100-150 г. Масса этих шасси – 360г включая серво. Для управления шасси вполне достаточно стандартного серво (модификация 180 градусов), но для того, что бы корпус серво выдержал возможные толчки при посадке, снаружи сделано укрепление с еще одним подшипником.
Падение камеры с вертолета.
При выполнении акробатических полетов камера жестко крепится к корпусу модели. На этом видео видно, сколь велико может быть ускорение при вращении вертолета. Простая камера была установлена над хвостовым ротором, при резком развороте карбоновую стойку камеры сломало. Конечно, столь резкие маневры с камерой выполнять не желательно, но обеспечить надежное крепление необходимо.
Простая модель самолета для любительской фото и видеосъемки.
В качестве модели взято летающее крыло. Размах 120 см, полетный вес 700-1000 г. Модель достаточно тяжелая, быстрая и стабильная, что бы ее сильно не болтало в воздушных потоках, при этом достаточно компактная для транспортировки.
Запуск и посадка на небольшом поле. Двигатель со статической тягой 1200 г позволяет запускать модель с руки и взлетать вертикально вверх. Но из-за высокой скорости полета и достаточно хорошей аэродинамики модели требуется большая поляна для посадки. Чтобы сажать модель на небольшом поле я использовал торможение двигателем. Обычные регуляторы хода безколлекторных двигателей не позволяют включать реверс во время полета. По-этому я установил реле реверса, управляемое дополнительным каналом. Реверс необходимо включать при остановленном двигателе, для этого в регуляторе хода была включена функция тормоза. Схема подключения:
Торможение двигателем позволяет выполнять крутое снижение и за несколько метров полностью сбрасывать скорость.
Фотоаппарат Canon IXUS 5.0 - любительский, малых размеров и в металлическом корпусе. Для установки фотоаппарата в центре пенопластового крыла вырезана ниша, так что фотоаппарат почти не выступает наружу. Фотоаппарат используется в режиме непрерывной фото или видео съемки. При этом за 5 минут полета полностью заполняется карточка в 2 Гб. Необходимые установки: короткая выдержка, фиксированный фокус, кнопка спуска остается зажатой с момента запуска модели. После приземления из 1000 сделанных фотографий можно выбрать несколько наиболее удачных. Этот фотоаппарат имеет аналоговый видео выход, сигнал с которого во время полета передается на землю для более удачного позиционирования модели. Для передачи видео сигнала использовался передатчик мощностью 0,5Вт и частотой 1 ГГц. Для отображения сигнала использовался походный телевизор. Однажды модель на полной скорости врезалась в землю, но фотоаппарат не пострадал.