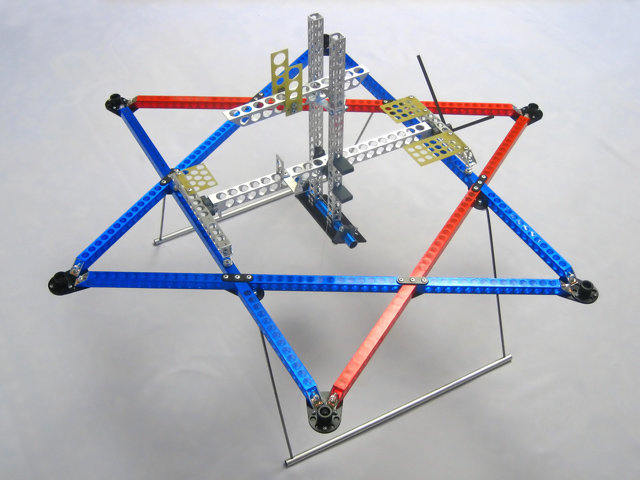
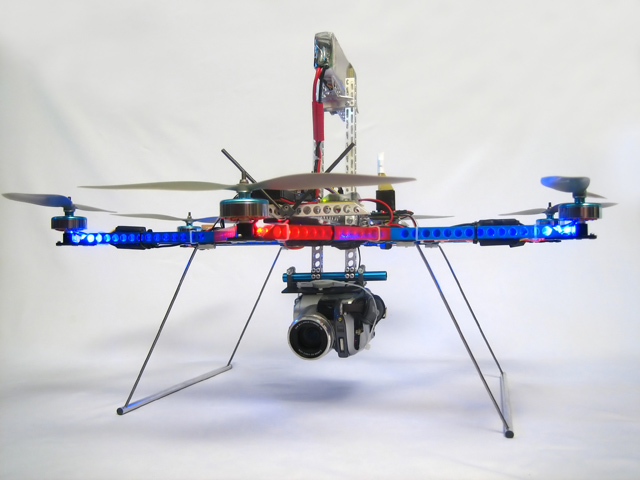
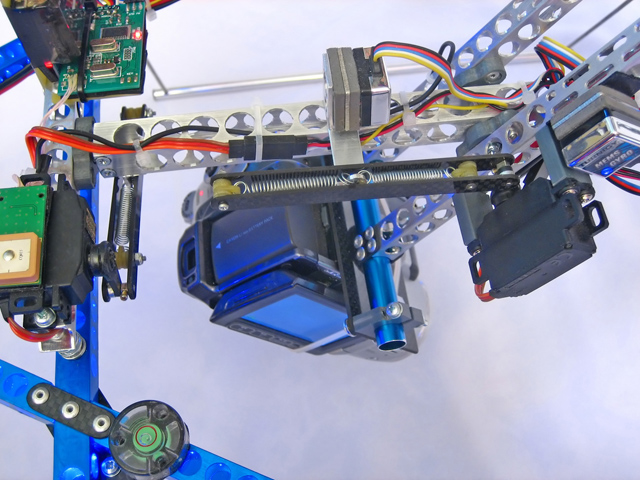
Servo drive for an inertial camera stabilizer Stabilization on a regular servo gear (year 2011) works in the following way: a) an unwanted tilt takes place; b) electronics measure the tilt value; c) the servo gear compensates the tilt. Ecilop is not just about stabilization, it's about initial camera stability plus tilt control. An usual direct servo-gear has measurable side play and it seriously affects the image quality (usual gimbal). In case of Ecilop's inertial stabilization, you cannot specify an exact discrete value. The camera may tilt, but it happens smoothly. Flying controller is responsible for the camera tilt and compensation of hull tilt. Direct servo translates twitching into camera. Bad mount with direct gear drive causes strong twitching; expensive mount - less twitching and more delays due to additional reduction gear. Gimbal with direct brushless drive provides smooth rotation but is heavy, weak and uses lots of energy. Inertial stabilization is needed to eliminate twitching. For inertial stabilization to work properly hard link between gimbal and frame must be eliminated. System with springs automatically turn into balance wheel that swings. To avoid swinging on the Ecilop signal from flight controller to the servo is translated through gyroscope. The key advantages of Ecilop-1, Ecilop-2, Ecilop-3 drones: 1. The use of an onboard battery as a counterweight for the camera unit enhances the stabilization effect. 2. The use of a counterweight enables the implementation of a compact, lightweight and rigid rotation mechanism. 3. The relocation of the battery to the stabilized platform produces a favorable effect on the maneuverability of the drone. 4. Absence of a hard connection with the servo-unit prevents camera jerks and jitter. 5. Adjustable fixtures make it possible to easily obtain accurate balancing of the camera gimbal in three dimensions. 6. Precise balancing of the camera mount makes it possible to use lightweight and fast servo-units. 7. Electronic gyroscopes are installed on the stabilizable part of the camera mount and prevent swaying. 8. Soft shock absorbers suppresses vibrations in a wide range of frequencies. 9. Shock absorbers are installed on the same level with rotation axis, which prevents camera swaying during maneuvering. 10. Onboard electronics is installed on the platform with shock absorbers. The increased weight of the platform makes it more stable. 11. Autopilot accelerometers are better protected from vibrations and therefore produce more accurate results. 12. The matching of the vertical center of mass of the drone with the rotor rotation plane decreases drone swaying during maneuvering. 13. The leaning of rotor blades towards of the drone's center improves stability and widens the camera's viewing angle. 14. The camera is fastened using a lens clamp (Ecilop-3). This type of fixture is more reliable, compact and weighs less than an underlying platform. Aleksey Zaitsevsky, 2011, http://www.myresearch.company |