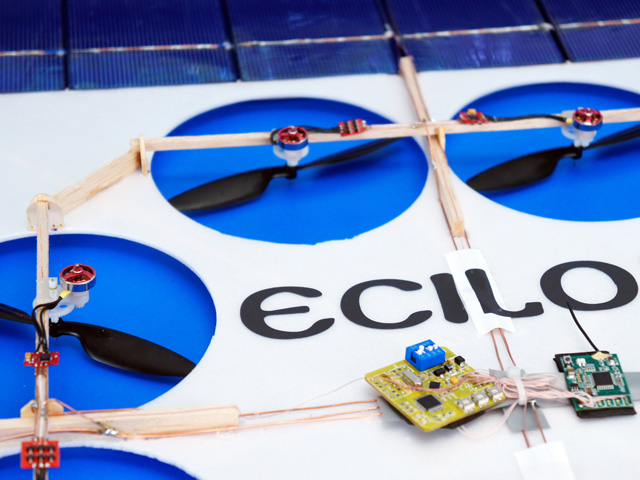
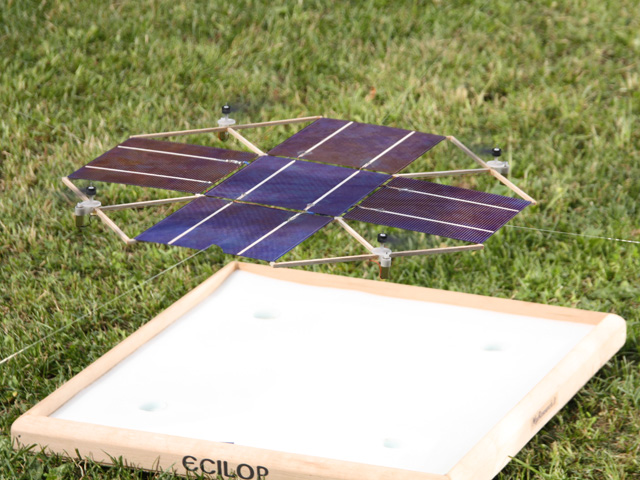
Increasing the rotor efficiency of a rotary-wing drone Evaluation of reliability of drones with low disk loading Evaluation of the applicability of solar panels in multi-copters How to assemble a solar multi-copter Ecilop Solar (Ecilop-8) is the first in the world radio-controlled multi-copter that uses solar energy as the sole source of energy. It also could be called a Hovercraft or a Ground effect vehicle. Technical characteristics:
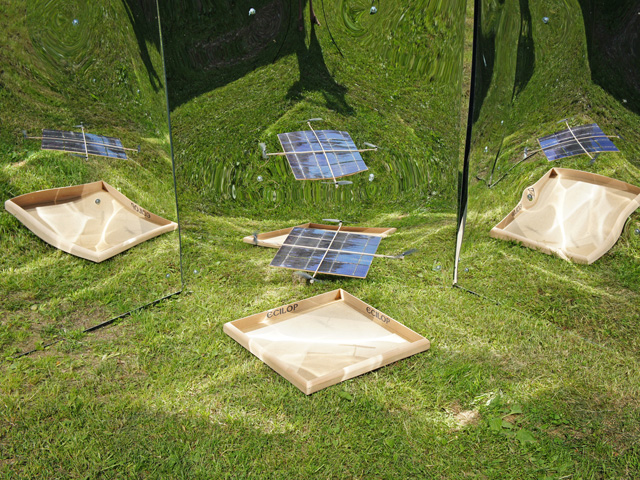
The drone is controlled as a quad-copter, 8 rotors are connected pair-wise. There is no onboard battery. To configure controllers inside a building, the user connects an external battery. To restart the controller in sunlight, the user bridges the power leads. The vehicle remains airborne because of ground effect and automatically maintains a horizontal attitude. If the control panel allows mixing of control signals for the multicopter's different motors, no on-board flight controller need be installed. We utilized a mirror to concentrate solar energy in order to raise the vehicle higher off the ground. This is not a commercial project and the drone is not available for purchase.
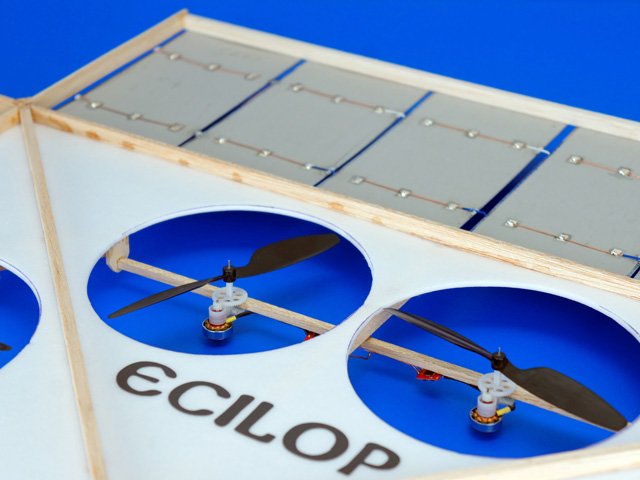
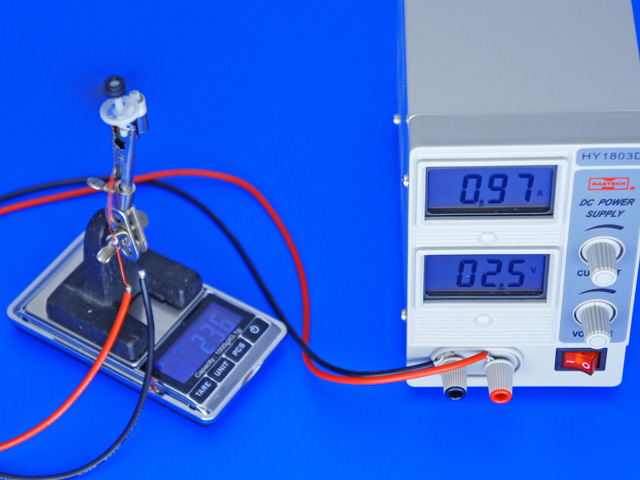
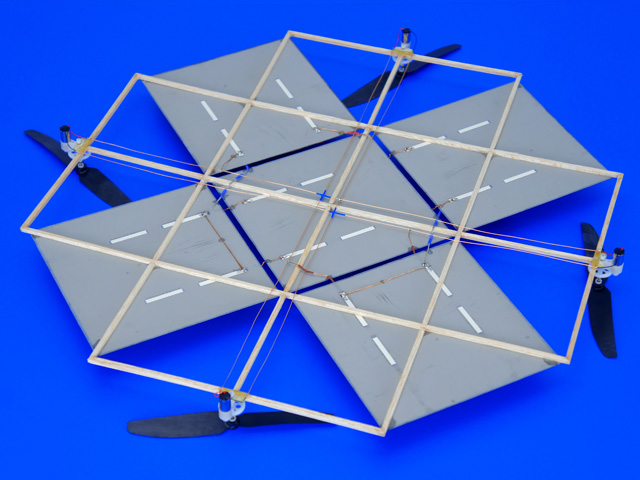
Increasing the rotor efficiency of a rotary-wing drone Reducing in-flight power consumption requires lowering the rotor disk loading. This means that we need to increase the diameter of the rotors and decrease the rotation speed. In Ecilop-8, the frame carrying the solar panels acts as a screen, thus providing extra efficiency. A good example of a highly efficient drone is the man-powered GAMERA-II. This aircraft has a rotor disk loading of 0.176 kg/m^2 and a static thrust of 203 kgs/kWt. If the muscle power is replaced with an electric motor with modern Li-on batteries (as of 2012), the flight duration of the drone will exceed 20 hours. Evaluation of reliability of drones with low disk loading Light drones cannot be used in windy conditions. When bending around various obstacles near the surface, the wind generates intense vortices. If the wind pressure on the surface of an aircraft is higher than its own loading, it will tumble in an uncontrollable fashion (we are talking about a multi-copter with a fixed blade angle of attack). We must evaluate the sum of the drone's disk loading and the total surface of the aircraft body. The simplified formula for calculating the dynamic air pressure is: Evaluation of the applicability of solar panels in multi-copters Sunlight intensity in clear weather conditions is around 1000 W per square meter. However, most of the time in Europe, this parameter does not exceed 100 W per square meter. With an energy conversion ratio of 15%, solar cells will produce 15 W. The air power is calculated using the following formula: How to assemble a solar multi-copter A small multi-copter will require miniature DC motors with a gearbox. Static thrust should not be lower than 10 g per 1 W of energy. If the drone is not controllable, the voltage of the solar battery must only be sufficient for hovering. For instance, if 3V is enough for take-off, the solar battery must consist of six elements. By increasing the area of your solar panels, you will enable the drone to take off under worse lighting conditions. However, large panels will be too heavy and the drone will not be able to lift them.
Aleksey Zaitsevsky, 2013, http://www.myresearch.company |